MIT's New Cheetah Robot Navigates While 'Blind'
MIT






No eyes? No problem.
Robots and other autonomous things often rely on cameras to "see" the world around them and navigate.
But what happens when one of these robots encounters some place where they can't rely on their form of vision?
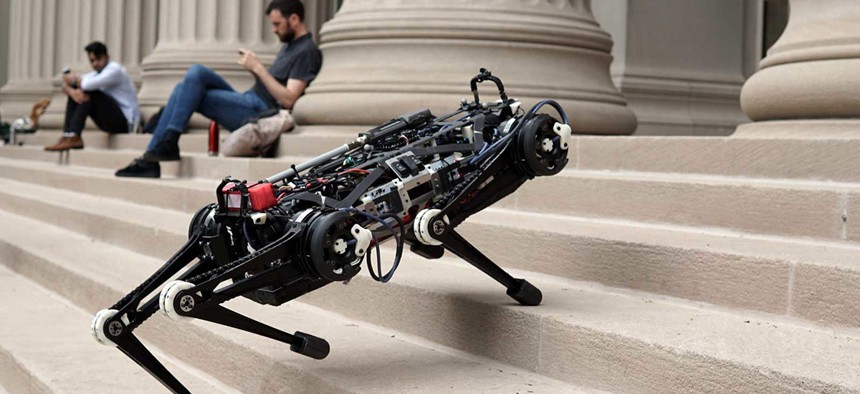
The Massachusetts Institute of Technology has developed the Cheetah 3 robot that can maneuver around without any sight. Instead, it navigates through only contact detection, Engadget reports.
Multiple algorithms enable it to feel it's way around, much like a human would in a dark room looking for a light switch. One algorithm relies on accelerometers, gyroscopes and leg joint positions to calculate the robot's chances of making contact, while another predicts the Cheetah's positioning so that it can get back on track if it's shoved or moved.
Combined, this allows the Cheetah to run, climb and jump with no problem, even on rough surfaces littered with debris.
"Vision can be noisy, slightly inaccurate, and sometimes not available, and if you rely too much on vision, your robot has to be very accurate in position and eventually will be slow. So we want the robot to rely more on tactile information. That way, it can handle unexpected obstacles while moving fast," said Sangbae Kim, associate professor of mechanical engineering at MIT, who designed the robot.
Kim hopes that the robot could be put to use doing dangerous jobs such as power plant inspections.
See the Cheetah 3 robot in action in the video below: