Sandia looks to open-source robot tech





The national lab is developing more energy-efficient motors to improve the endurance of legged robots used in disaster response.
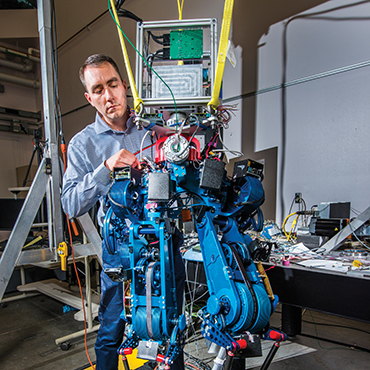
Steve Buerger is leading a Sandia National Laboratories project to demonstrate energy-efficient biped robots. Increased efficiency could enable bots to operate for much longer periods of time without recharging batteries, an important factor in emergency situations. (Photo by Randy Montoya)
Researchers at federal defense and energy laboratories are open sourcing some of the electronics and software for two advanced ambulatory robots in hopes of boosting their ability to handle perilous situations.
In a Dec. 16 announcement, the Energy Department's Sandia National Laboratories said it is developing more energy-efficient motors to dramatically improve the endurance of legged robots performing the types of motions that are crucial in disaster response situations. The project is supported by the Defense Advanced Research Projects Agency.
Sandia is developing two robots for the DARPA Robotics Challenge, a competition in which robots face degraded physical environments that simulate conditions in natural or man-made disasters. Many of the robots will walk on legs to allow them to negotiate the challenging terrain, according to Sandia.
Sandia said its two automatons won't participate in the competition's finals next June, but the lab's more energy-efficient platforms could help any robots entered in the DARPA Challenge extend their battery life.
The Sandia Transmission Efficient Prototype Promoting Research, or STEPPR, robot is a fully functional research platform that allows developers to try different mechanisms that perform like elbows and knees to quantify how much energy is used.
Sandia officials said the second robot -- named Walking Anthropomorphic Novelly Driven Efficient Robot for Emergency Response, or WANDERER -- will be a better-packaged prototype.
The Open Source Robotics Foundation is developing the two robots' electronics and low-level software, and the designs will be publicly released to allow engineers and developers worldwide to take advantage of them.
Sandia said the key to the testing is the novel, energy-efficient actuators that move the robots' joints. "The actuation system uses efficient brushless DC motors with high torque-to-weight ratios, efficient low-ratio transmissions and specially designed passive mechanisms customized for each joint to ensure energy efficiency," the Sandia announcement states.